
🔥 Discover this must-read post from Hacker News 📖
📂 **Category**:
📌 **What You’ll Learn**:
Polynomial interpolation is a method of finding a polynomial function
that fits a given set of data perfectly. More concretely, suppose we
have a set of distinct points :
And we want to find the polynomial coefficients
such that:
Fits all our points; that is , etc.
This post discusses a common approach to solving this problem, and also
shows why such a polynomial exists and is unique.
Showing existence using linear algebra
When we assign all points into the generic polynomial
, we get:
We want to solve for the coefficients . This is a linear
system of equations that can be represented by the following matrix
equation:
The matrix on the left is called the Vandermonde matrix. This matrix
is known to be invertible (see Appendix for a proof); therefore, this
system of equations has a single solution that can be calculated by
inverting the matrix.
In practice, however, the Vandermonde matrix is often numerically
ill-conditioned, so inverting it isn’t the best way to calculate exact
polynomial coefficients. Several better methods exist.
Lagrange Polynomial
Lagrange interpolation polynomials emerge from a simple, yet powerful
idea. Let’s define the Lagrange basis functions
() as follows, given our points :
In words, is constrained to 1 at  and to 0 at
and to 0 at
all other . We don’t care about its value at any other point.
The linear combination:
is then a valid interpolating polynomial for our set of
points, because it’s equal to  at each (take a
at each (take a
moment to convince yourself this is true).
How do we find ? The key insight comes from studying the
following function:
This function has  terms for all
terms for all
. It should be easy to see that is 0 at
all when .
What about its value at , though? We can just assign
into to get:
And then normalize , dividing it by this (constant) value. We get
the Lagrange basis function :
Let’s use a concrete example to visualize this. Suppose we have the
following set of points we want to interpolate:
. We can calculate ,
and , and get the following:
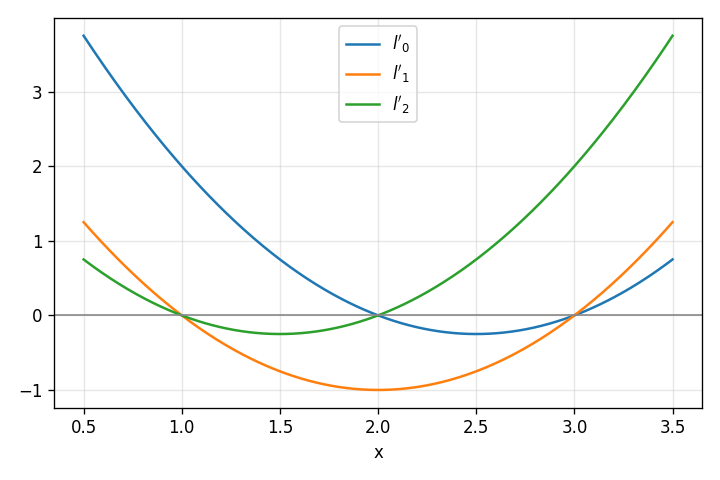
Note where each intersects the  axis. These
axis. These
functions have the right values at all . If we
normalize them to obtain , we get these functions:
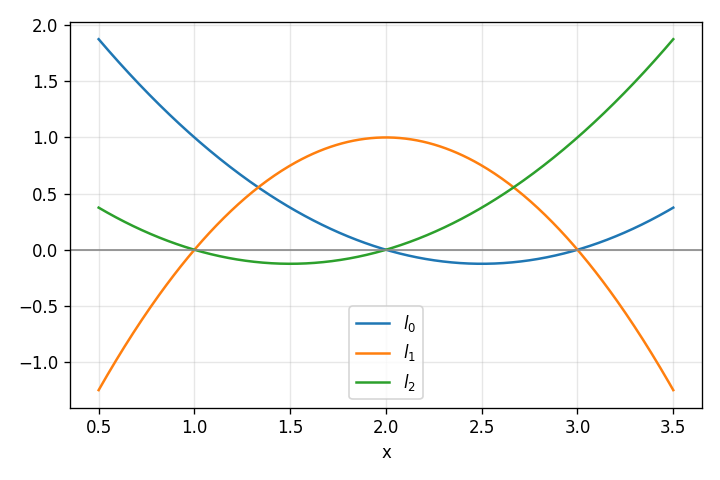
Note that each polynomial is 1 at the appropriate and 0 at
all the other , as required.
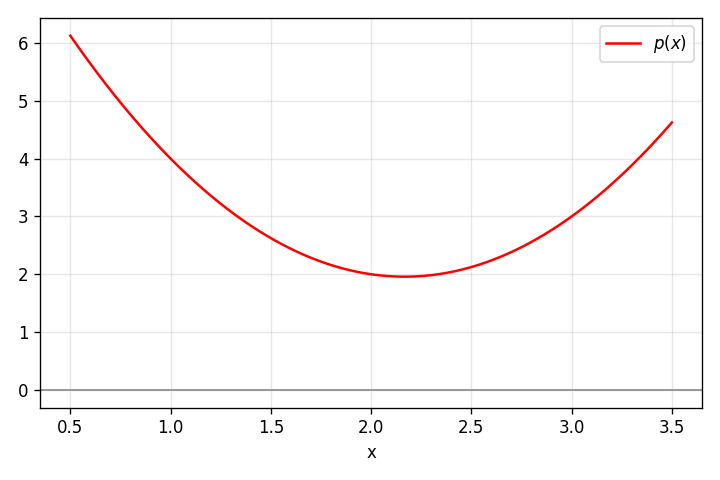
With these , we can now plot the interpolating polynomial
, which fits our set of input points:
Polynomial degree and uniqueness
We’ve just seen that the linear combination of Lagrange basis functions:
is a valid interpolating polynomial for a set of distinct
points . What is its degree?
Since the degree of each is , then the degree of
is at most . We’ve just derived the first part
of the Polynomial interpolation theorem:
Polynomial interpolation theorem: for any data points
where no
two are the same, there exists a unique polynomial
of degree at most that interpolates these points.
We’ve demonstrated existence and degree, but not yet uniqueness. So
let’s turn to that.
We know that interpolates all points, and its
degree is . Suppose there’s another such polynomial
. Let’s construct:
That do we know about ? First of all, its value is 0 at all
our , so it has roots. Second, we also know
that its degree is at most (because it’s the difference of two
polynomials of such degree). These two facts are a contradiction.
No non-zero polynomial of degree can have
roots (a basic algebraic fact related to the Fundamental
theorem of algebra). So must be the zero polynomial; in
other words, our is unique .
Note the implication of uniqueness here: given our set of
distinct points, there’s only one polynomial of degree
that interpolates it. We can find its coefficients by inverting the
Vandermonde matrix, by using Lagrange basis functions, or
any other method .
Lagrange polynomials as a basis for
The set consists of all real polynomials of
degree . This set – along with addition of polynomials and
scalar multiplication – forms a vector
space.
We called the “Lagrange basis” previously, and they do –
in fact – form an actual linear algebra basis for this vector space. To
prove this claim, we need to show that Lagrange polynomials are linearly
independent and that they span the space.
Linear independence: we have to show that
implies . Recall that is 1
at , while all other are 0 at that point.
Therefore, evaluating at , we get:
Similarly, we can show that is 0, for all 
.
Span: we’ve already demonstrated that the linear combination of
:
is a valid interpolating polynomial for any set of distinct
points. Using the polynomial interpolation theorem, this is the unique
polynomial interpolating this set of points. In other words, for every
, we can identify any set of distinct points it passes
through, and then use the technique described in this post to find the coefficients of in the
Lagrange basis. Therefore, the set spans
the vector space .
Interpolation matrix in the Lagrange basis
Previously we’ve seen how to use the
basis to write down a system of linear equations that helps us find the
interpolating polynomial. This results in the Vandermonde matrix.
Using the Lagrange basis, we can get a much nicer matrix representation
of the interpolation equations.
Recall that our general polynomial using the Lagrange basis is:
Let’s build a system of equations for each of the points
. For  :
:
By definition of the Lagrange basis functions, all
where are 0, while is 1. So this
simplifies to:
But the value at node is  , so we’ve just found
, so we’ve just found
that . We can produce similar equations for the other
nodes as well, , etc. In matrix form:
We get the identity matrix; this is another way to trivially show that
, and so on.
Appendix: Vandermonde matrix
Given some numbers a matrix of this form:
Is called the Vandermonde matrix. What’s special about a Vandermonde
matrix is that we know it’s invertible when are distinct.
This is because its determinant is known to be
non-zero.
Moreover, its determinant is :
Here’s why.
To get some intuition, let’s consider some small-rank Vandermonde
matrices. Starting with a 2-by-2:
Let’s try 3-by-3 now:
We can use the standard way of calculating determinants to expand from
the first row:
Using some algebraic manipulation, it’s easy to show this is equivalent
to:
For the full proof, let’s look at the generalized
-by- matrix again:
Recall that subtracting a multiple of one column from another doesn’t
change a matrix’s determinant. For each column , we’ll
subtract the value of column multiplied by from
it (this is done on all columns simultaneously). The idea is to make the
first row all zeros after the very first element:
Now we factor out from the second row (after the first
element), from the third row and so on, to get:
Imagine we erase the first row and first column of  . We’ll call
. We’ll call
the resulting matrix  .
.
Because the first row of is all zeros except the first
element, we have:
Note that the first row of has a common factor of
, so when calculating , we can move this
common factor out. Same for the common factor of the
second row, and so on. Overall, we can write:
But the smaller matrix is just the Vandermonde matrix for
. If we continue this process by induction,
we’ll get:
If you’re interested, the Wikipedia page for the Vandermonde matrix has a couple of additional
proofs.
🔥 **What’s your take?**
Share your thoughts in the comments below!
#️⃣ **#Notes #Lagrange #Interpolating #Polynomials**
🕒 **Posted on**: 1772469616
🌟 **Want more?** Click here for more info! 🌟